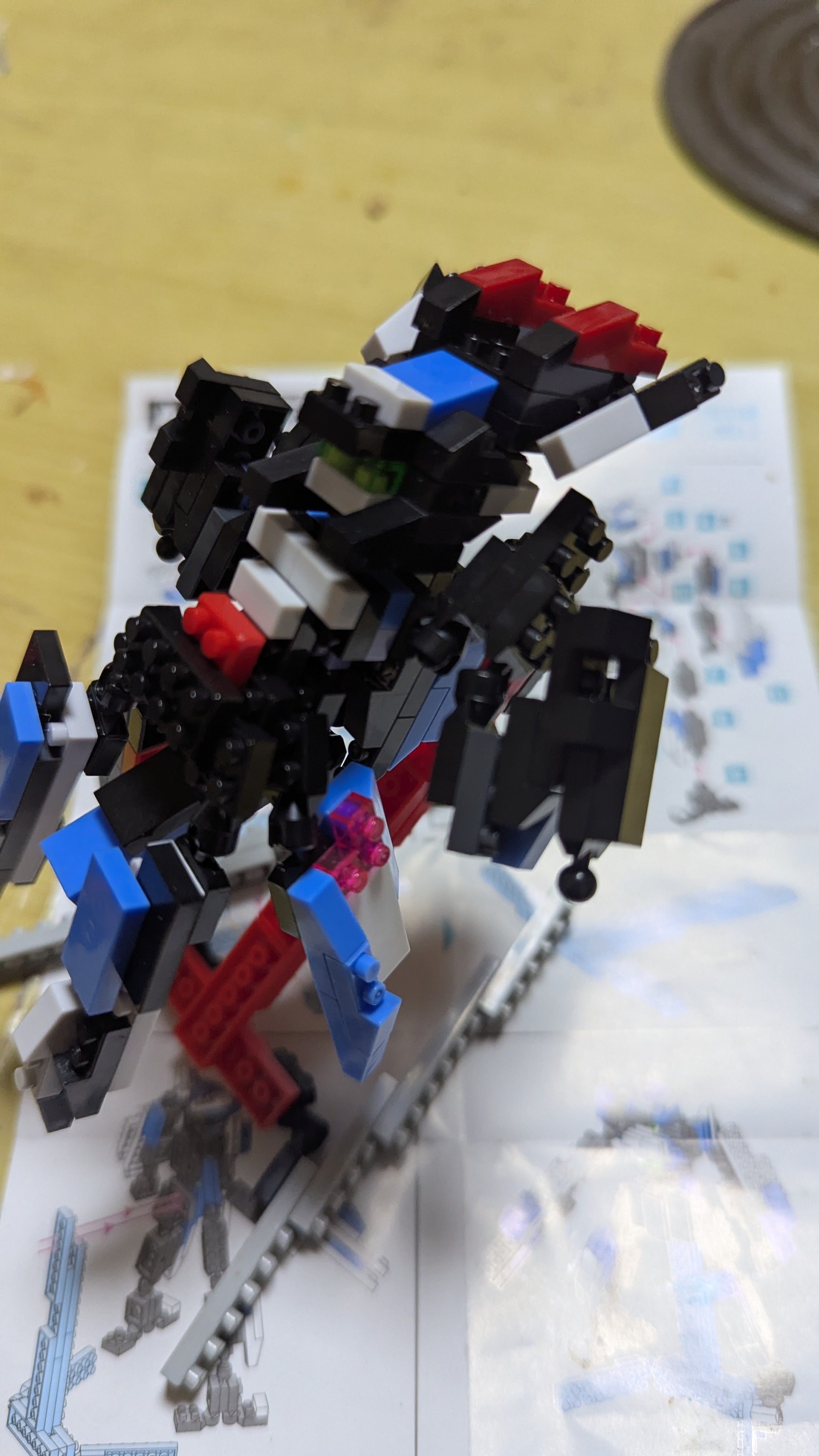
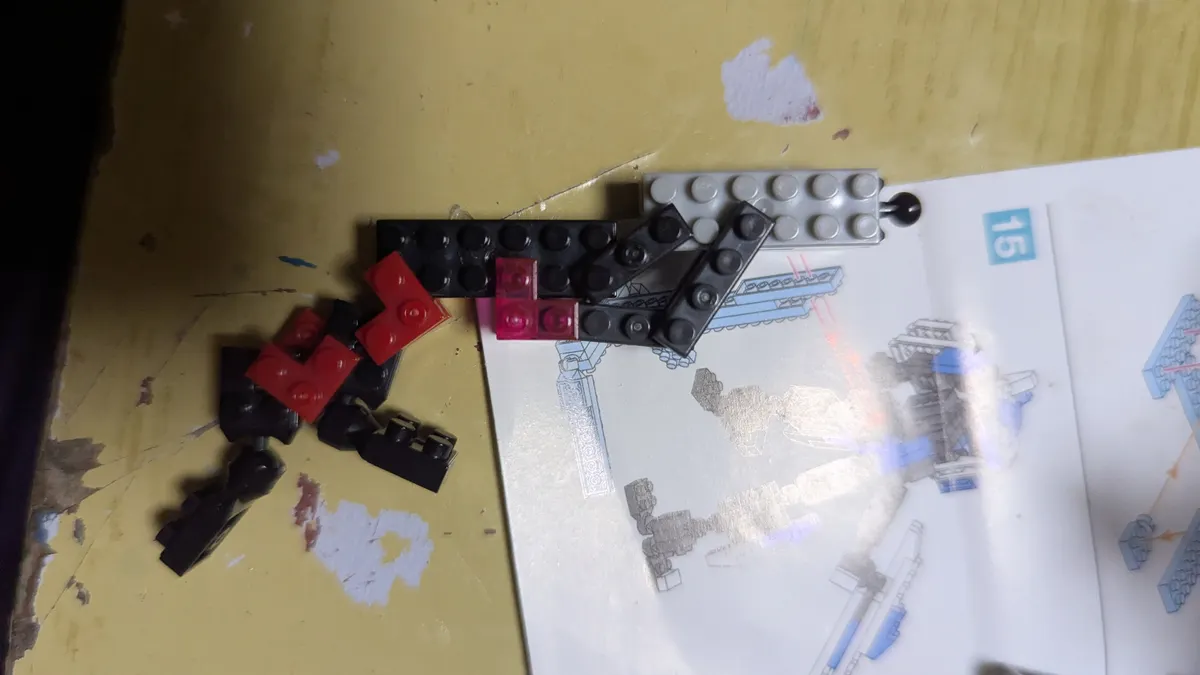
トップ > アレンジ投稿 > プチブロック > 制作中 RX-0 STAFF 2026/02/09 19:05 制作中 前逆関節のロボを製作してましたが、没になりゼータ式可変で見た目が酷かったり保持力問題などがでて没になりました。それで今回新しいのを制作してます 今は足のベースを作ってる最中です 可動域は初期hgぐらい いいね 共有する 共有する X facebook LINE リンクをコピー コメントする 2 件の返信 (新着順) ミュートしたユーザーの投稿です。 投稿を表示 どらごん 2026/02/10 19:55 以前に毎回保持力なくてぶっ壊れたりのような事を仰っていたような気がしますが、それがこの関節構造のような組み方で頻発するという事であれば、なるほどな、という感じですかね… 1つのブロックで「接続部全てが可動軸扱い」「片持ち式可動軸」は、プチブロックでは保持力を持たせようがありませんから… 飾りとしての可動部(フレームの見せシリンダー等)という事であれば、それでいい場合もありますけどね…w いいね 返信する ミュートしたユーザーの投稿です。 投稿を表示 RX-0 STAFF 2026/02/10 20:19 どらごん 今回は崩壊覚悟で作ってます明らかに自重に耐えれる構造ではないですもんねちなみに可変機にこの関節使ってません ちなみにこのあと足首ありえんぐらい補助力落ちてきたのでジョイントに変えましたがギリギリでたってます。上半身が重すぎるんや いいね 返信する ミュートしたユーザーの投稿です。 投稿を表示 武史先輩俺! 2026/02/09 23:13 メカメカしい関節部分良いですね😃✨ いいね 返信する ミュートしたユーザーの投稿です。 投稿を表示 RX-0 STAFF 2026/02/10 07:21 武史先輩俺! ありがとうございます! いいね 返信する








 共有する
共有する




ミュートしたユーザーの投稿です。
投稿を表示以前に毎回保持力なくてぶっ壊れたりのような事を仰っていたような気がしますが、それがこの関節構造のような組み方で頻発するという事であれば、なるほどな、という感じですかね…
1つのブロックで「接続部全てが可動軸扱い」「片持ち式可動軸」は、プチブロックでは保持力を持たせようがありませんから…
飾りとしての可動部(フレームの見せシリンダー等)という事であれば、それでいい場合もありますけどね…w
ミュートしたユーザーの投稿です。
投稿を表示メカメカしい関節部分良いですね😃✨